咨詢電話
13924666952
400-158-1606


什么是機器人控制系統?下面就跟著華成工控的小編一起來了解一下:
如果說機器人門禁來源于兩個方面。一方面是因為來自發出的信號去接收的信號和處理,另一方面也是因為沒有發出任何信號,就沒法接受信號,也就是驅使行動收縮或舒張信息。如果機器人門禁系統只有傳感接收器和驅動器,機械臂也不能正常工作。原因是傳感器輸出的信號沒有起作用,驅動電動機也得不到驅動電壓和電流,所以機器人門禁控制系統需要有一個控制器,用硬件坨和軟件組成一個的控制系統。
機器人門禁控制系統的功能是接收來自傳感器的檢測信號,根據操作任務的要求,驅動機械臂中的各臺電動機就像我們人的活動需要依賴自身的感官一樣,機器人的運動控制離不開傳感器。機器人需要用傳感器來檢測各種狀態。機器人的內部傳感器信號被用來反映機械臂關節的實際運動狀態,機器人的外部傳感器信號被用來檢測工作環境的變化。所以機器人的神經與大腦組合起來才能成一個完整的機器人控制系統。
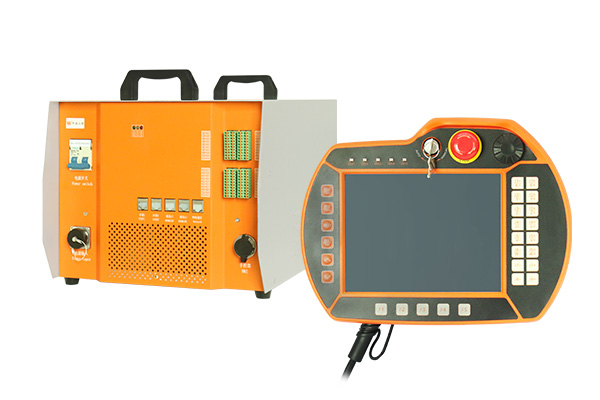
通用機器人控制系統-華成ES-R6驅控一體柜控制系統
機器人的運動控制系統包含以下幾個方面:
1、執行機構----伺服電機或步進電機;
2、驅動機構----伺服或者步進驅動器;
3、控制機構----運動控制器,做路徑和電機聯動的算法運算控制;
4、控制方式----有固定執行動作方式的,那就編好固定參數的程序給運動控制器;
5、如果有加視覺系統或者其他傳感器的,根據傳感器信號,就編好不固定參數的程序給運動控制器。
機器人控制系統的基本功能:
1.控制機械臂末端執行器的運動位置(即控制末端執行器經過的點和移動路徑);
2.控制機械臂的運動姿態(即控制相鄰兩個活動構件的相對位置);
3.控制運動速度(即控制末端執行器運動位置隨時間變化的規律);
4.控制運動加速度(即控制末端執行器在運動過程中的速度變化);
5.控制機械臂中各動力關節的輸出轉矩:(即控制對操作對象施加的作用力);
6.具備操作方便的人機交互功能,機器人通過記憶和再現來完成規定的任務;
7.使機器人對外部環境有檢測和感覺功能,工業機器人配備視覺、力覺、觸覺等傳感器進行測量、識別,判斷作業條件的變化。
工業機器人控制系統:
1、工業機器人控制系統硬件結構
控制器是機器人系統的核心,國外有關公司對我國實行嚴密封鎖。近年來隨著微電子技術的發展,微處理器的性能越來越高,而價格則越來越便宜,目前市場上已經出現了1-2美金的32位微處理器。高性價比的微處理器為機器人控制器帶來了新的發展機遇,使開發低成本、高性能的機器人控制器成為可能。為了保證系統具有足夠的計算與存儲能力,目前機器人控制器多采用計算能力較強的ARM系列、DSP系列、POWERPC系列、Intel系列等芯片組成。
此外,由于已有的通用芯片在功能和性能上不能完全滿足某些機器人系統在價格、性能、集成度和接口等方面的要求,這就產生了機器人系統對SoC(Systemon Chip)技術的需求,將特定的處理器與所需要的接口集成在一起,可簡化系統外圍電路的設計,縮小系統尺寸,并降低成本。
2、工業機器人控制系統體系結構
在控制器體系結構方面,其研究重點是功能劃分和功能之間信息交換的規范。在開放式控制器體系結構研究方面,有兩種基本結構,一種是基于硬件層次劃分的結構,該類型結構比較簡單,在日本,體系結構以硬件為基礎來劃分,如三菱重工株式會社將其生產的PA210可攜帶式通用智能臂式機器人的結構劃分為五層結構;另一種是基于功能劃分的結構,它將軟硬件一同考慮,其是機器人控制器體系結構研究和發展的方向。
3、控制軟件開發環境
在機器人軟件開發環境方面,一般工業機器人公司都有自己獨立的開發環境和獨立的機器人編程語言
4、機器人伺服通信總線技術
目前國際上還沒有專用于機器人系統中的伺服通信總線,在實際應用過程中,通常根據系統需求,把常用的一些總線,如以太網、CAN、1394、SERCOS、USB、RS-485等用于機器人系統中。當前大部分通信控制總線可以歸納為兩類,即基于RS-485和線驅動技術的串行總線技術和基于實時工業以太網的高速串行總線技術。
智能機器人控制系統
1.開放性模塊化的控制系統體系結構:采用分布式CPU計算機結構,分為機器人控制器(RC),運動控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機器人控制器(RC)和編程示教盒通過串口/CAN總線進行通訊。機器人控制器(RC)的主計算機完成機器人的運動規劃、插補和位置伺服以及主控邏輯、數字I/O、傳感器處理等功能,而編程示教盒完成信息的顯示和按鍵的輸入。
2.模塊化層次化的控制器軟件系統:軟件系統建立在基于開源的實時多任務操作系統Linux上,采用分層和模塊化結構設計,以實現軟件系統的開放性。整個控制器軟件系統分為三個層次:硬件驅動層、核心層和應用層。三個層次分別面對不同的功能需求,對應不同層次的開發,系統中各個層次內部由若干個功能相對對立的模塊組成,這些功能模塊相互協作共同實現該層次所提供的功能。
3.機器人的故障診斷與安全維護技術:通過各種信息,對機器人故障進行診斷,并進行相應維護,是保證機器人安全性的關鍵技術。
4.網絡化機器人控制器技術:目前機器人的應用工程由單臺機器人工作站向機器人生產線發展,機器人控制器的聯網技術變得越來越重要。控制器上具有串口、現場總線及以太網的聯網功能。可用于機器人控制器之間和機器人控制器同上位機的通訊,便于對機器人生產線進行監控、診斷和管理。
版權所有 ? 深圳市華成工業控制股份有限公司 未經許可不得復制、轉載或摘編,違者必究 版權聲明
Copyright ? Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號: 粵ICP備19106162號
技術支持:新新網絡

