咨詢電話
13924666952
400-158-1606


EC-RX系列機器人控制系統,系統相關通訊配置設置如下:
點擊“通訊配置”進入如下頁面,在此頁面可以進行通訊配置相關設置:
此頁面用于配置通訊參數使用,主要分為三大類型:485通訊、CAN通訊和網絡通訊。
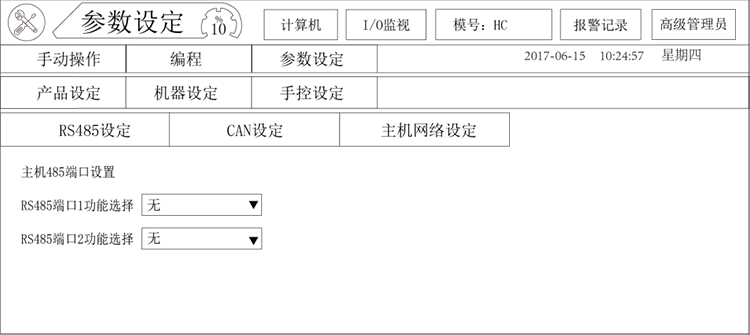
點擊“RS485設定”按鍵,彈出如下頁面:
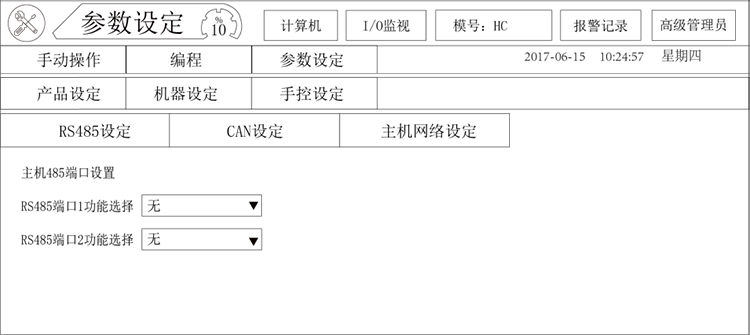
主機包含2個RS485端口,每個端口可以選擇如下功能:
RS485編碼器:布瑞特RS485編碼器,目前可以用于跟隨工藝。(不推薦使用)。
RS485模擬量模塊:公司配套的模擬量模塊板。
MODBUS主站:選擇后本控制器作為MODBUS主站。選擇后頁面變換如下:
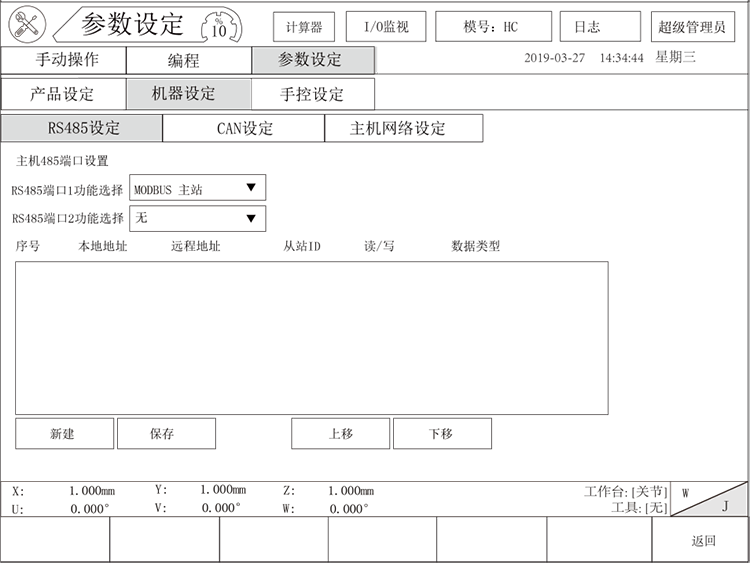
在該頁面中可以添加MODBUS通信變量。按如下步驟操作:
1. 點擊“新建”按鈕:頁面變換如下:
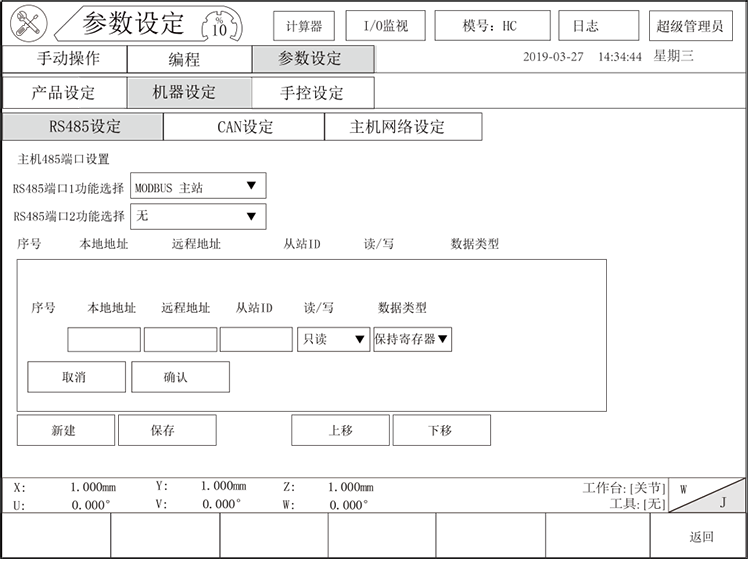
本地地址:控制器開放的800-900直接的地址。
遠程地址:MODBUS從站的變量地址。
從站ID:MODBUS從站的地址。
讀/寫:控指明該規則的操作方式是讀“遠程地址”還是把“本地地址”的值發送給MODBUS從站。
數據類型:MODBUS協議的功能碼。
1. 規則設定完后點擊“確認”完成設定。
2. 點擊“保存”按鍵,保存所有的規則。
擴展IO:公司配套的擴展IO板。
MODBUS從站:公選擇后本控制器作為MODBUS從站,可以參考“遠程通信說明文檔”進行MODBUS通信。
焊接尋位:基恩士的激光測量設備。(不建議使用)
點擊“CAN設定”按鍵,彈出如下頁面:
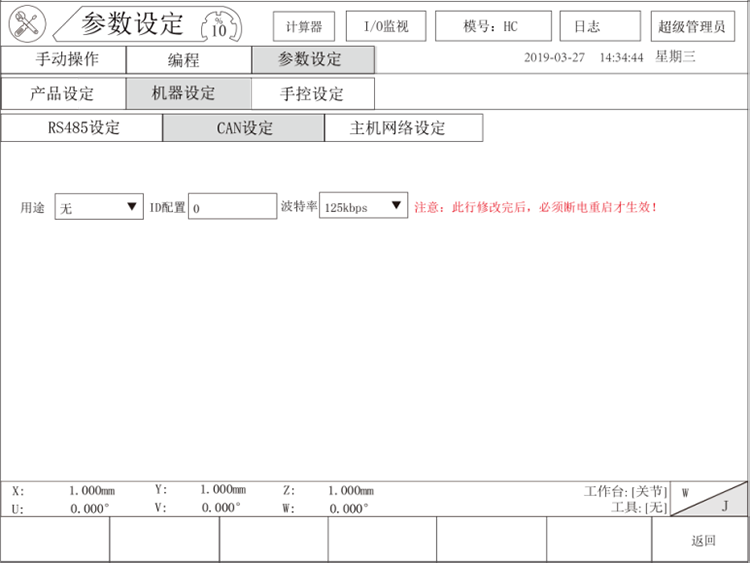
ID配置:本控制器的CAN通信ID地址。
波特率:CAN通信時采用的通信速率。
用途:CAN口用作的功能,有如下幾種:
編碼器:布瑞特單圈絕對值CAN編碼器,用戶傳送帶跟隨應用。
模擬量模塊:不再使用。
扭矩:脈沖系列產品用于讀取伺服扭矩。
聯機:沖壓工藝聯機使用,具體參考“沖壓工藝說明”。
CAN網絡通信:使用后可以在教導指令里面使用CAN指令。
點擊“主機網絡設定”按鍵,彈出如下頁面:
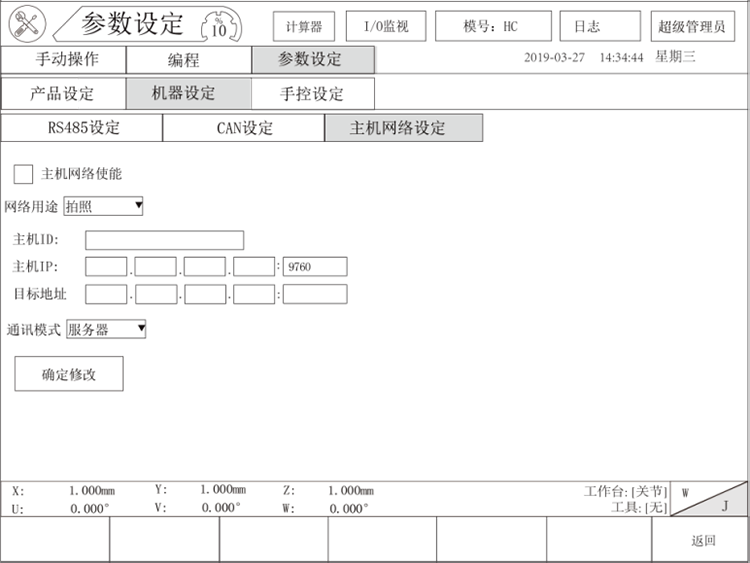
主機網絡使能:開放主機的網絡接口。
網絡用途:有如下兩個特殊用途:。
拍照:開啟視覺通信拍照功能,其它功能默認都選該選項。
焊接尋位:通過網絡口和焊機通信時選擇該選項。
主機ID:MODBUS協議使用的主機ID。
主機IP:主機的本機IP地址,需要設置為與通信設備同一網段。
目標地址:與本機IP通信的目標IP地址,“通信模式”為客戶端時必須設定。
通信模式:
服務器:本機做為通信的服務器端。
客戶端:本機做為通信的客戶端。
確定修改:保存網絡設定。
版權所有 ? 深圳市華成工業控制股份有限公司 未經許可不得復制、轉載或摘編,違者必究 版權聲明
Copyright ? Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號: 粵ICP備19106162號
技術支持:新新網絡

